PyTorch(ONNX)转Tengine
环境相关
python3 -m pip install onnx==1.8.1 onnx-simplifier
onnx-simplifier 在 1.8.1之后就从onnx中分离了
检查protobuf的版本一至性
$ protoc --version
libprotoc 3.7.0
$ python3 -m pip show protobuf
Name: protobuf
Version: 3.12.4
Summary: Protocol Buffers
Home-page: https://developers.google.com/protocol-buffers/
Author:
Author-email:
License: 3-Clause BSD License
Location: /home/aipos/.local/lib/python3.8/site-packages
Requires: setuptools, six
Required-by: onnx, onnx-simplifier, onnxruntime
yolov5s V5
class Detect(nn.Module):
stride = None # strides computed during build
onnx_dynamic = True # ONNX export parameter
def __init__(self, nc=80, anchors=(), ch=()): # detection layer
super(Detect, self).__init__()
self.nc = nc # number of classes
self.no = nc + 5 # number of outputs per anchor
self.nl = len(anchors) # number of detection layers
self.na = len(anchors[0]) // 2 # number of anchors
self.grid = [torch.zeros(1)] * self.nl # init grid
a = torch.tensor(anchors).float().view(self.nl, -1, 2)
self.register_buffer('anchors', a) # shape(nl,na,2)
self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
def forward(self, x):
# x = x.copy() # for profiling
z = [] # inference output
#self.training |= self.export
for i in range(self.nl):
x[i] = self.m[i](x[i]) # conv
bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
if not self.training: # inference
if self.grid[i].shape[2:4] != x[i].shape[2:4]:
self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
# y = x[i].sigmoid()
# y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
# y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
# z.append(y.view(bs, -1, self.no))
# return x if self.training else (torch.cat(z, 1), x)
return x
shape要一至
# Input to the model
dummy_input = torch.randn(1, 3, 1280, 1280)
# Export the model
torch.onnx.export(torch_model,
dummy_input,
output_onnx, # 保存路径
verbose=True,
export_params=True,
opset_version=11, # the ONNX version to export the model to
do_constant_folding=True,
training=torch.onnx.TrainingMode.EVAL,
input_names=['images'],
output_names=['output'],
dynamic_axes=None
)
编译失败与convert_tool崩溃的处理
asymmetric的问题,因为下面的mode值为nearest,所以align_corner并没起作用。
# V5
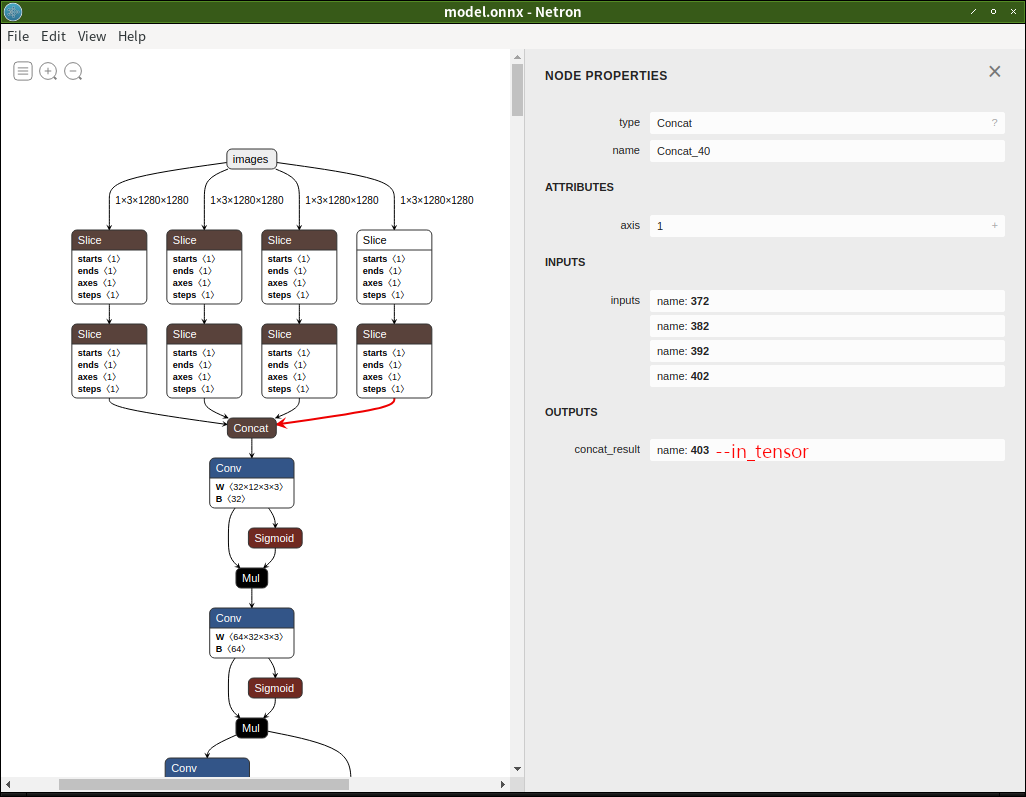
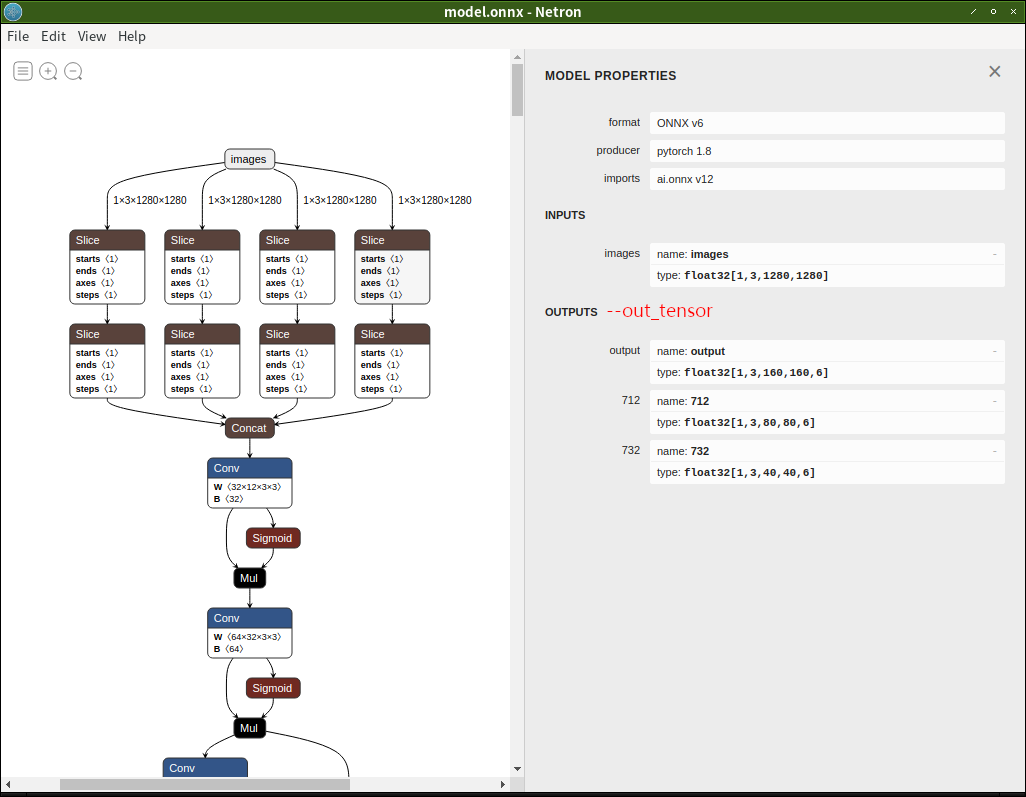
python3 ./tools/optimize/yolov5s-opt.py --input model.onnx --output model_opt.onnx --in_tensor 403 --out_tensor output,712,732 --verbose
# V6
python3 ./tools/optimize/yolov5s-opt.py --input model.onnx --output model_opt.onnx --in_tensor 403 --out_tensor output,712,732 --cut_focus --verbose
wii@wiiD:/media/wii/disk1t/Tengine$ git diff tools/convert_tool/onnx/onnx2tengine.cpp
diff --git a/tools/convert_tool/onnx/onnx2tengine.cpp b/tools/convert_tool/onnx/onnx2tengine.cpp
index 1aa3c57c..aca5f85c 100644
--- a/tools/convert_tool/onnx/onnx2tengine.cpp
+++ b/tools/convert_tool/onnx/onnx2tengine.cpp
@@ -2105,7 +2105,7 @@ static int load_resize(ir_graph_t* graph, ir_node_t* node, const onnx::NodeProto
interp_param->width_scale = 0;
std::string coordinate_transformation_mode = GetAttributeOrDefault<std::string>(onnx_node, "coordinate_transformation_mode", "half_pixel");
- TASSERT(coordinate_transformation_mode == "half_pixel" || coordinate_transformation_mode == "align_corners");
+ TASSERT(coordinate_transformation_mode == "half_pixel" || coordinate_transformation_mode == "align_corners" || coordinate_transformation_mode == "asymmetric");
int align_corner = (coordinate_transformation_mode == "align_corners");
if (onnx_node.input_size() == 1)
wii@wiiD:/media/wii/disk1t/Tengine$ git diff tools/save_graph/tm2_op_save.cpp
diff --git a/tools/save_graph/tm2_op_save.cpp b/tools/save_graph/tm2_op_save.cpp
index 7cd66bcd..1afc4eb6 100644
--- a/tools/save_graph/tm2_op_save.cpp
+++ b/tools/save_graph/tm2_op_save.cpp
@@ -21,6 +21,7 @@
* Copyright (c) 2019, Open AI Lab
* Author: jingyou@openailab.com
*/
+#include <stdlib.h>
#include <string.h>
#include "tm2_op_save.hpp"
./convert_tool -f onnx -m model_opt.onnx -o model.tmfile
- PyTorch转ONNX格式模型

- 删减foucs与优化

- ONNX转Tengine

测试
./build/install/bin/tm_yolov5s -m model.tmfile -i ./1.jpg -r 10
精度调整到UINT8
yolov5s 注意需要 -k -c -y 参数
time ./build/install/bin/quant_tool_uint8 -m yolov5s_v5_opt.tmfile -i ./test -o yolov5s_v5_uint8.tmfile -k 1 -c 1 -y 640,640 -g 12,640,640 -w 0,0,0 -s 0.004,0.004,0.004
---- Tengine Post Training Quantization Tool ----
Version : v1.2, 10:34:20 Dec 24 2021
Status : uint8, per-layer, asymmetric
Input model : yolov5s_v5_opt.tmfile
Output model: yolov5s_v5_uint8_2.tmfile
Calib images: ./test
Scale file : NULL
Algorithm : 0
Dims : 12 640 640
Mean : 0.000 0.000 0.000
Scale : 0.004 0.004 0.004
BGR2RGB : ON
Center crop : ON
Letter box : 640 640
YOLOv5 focus: ON
Thread num : 4
[Quant Tools Info]: Step 0, load FP32 tmfile.
[Quant Tools Info]: Step 0, load FP32 tmfile done.
[Quant Tools Info]: Step 0, load calibration image files.
[Quant Tools Info]: Step 0, load calibration image files done, image num is 697.
[Quant Tools Info]: Step 1, find original calibration table.
[Quant Tools Info]: Step 1, images 00697 / 00697
[Quant Tools Info]: Step 2, find original calibration table done, output ./table_minmax.scale
[Quant Tools Info]: Thread 4, image nums 697, total time 871674.08 ms, avg time 1250.61 ms
[Quant Tools Info]: Step 3, load FP32 tmfile once again
[Quant Tools Info]: Step 3, load FP32 tmfile once again done.
[Quant Tools Info]: Step 3, load calibration table file table_minmax.scale.
[Quant Tools Info]: Step 4, optimize the calibration table.
[Quant Tools Info]: Step 4, quantize activation tensor done.
[Quant Tools Info]: Step 5, quantize weight tensor done.
[Quant Tools Info]: Step 6, save UInt8 tmfile done, yolov5s_v5_uint8_2.tmfile
---- Tengine Int8 tmfile create success, best wish for your UInt8 inference has a low accuracy loss...\(^0^)/ ----
real 21m32.009s
user 48m9.673s
sys 0m13.687s